
Tue 11 May 2021:
Being unable to walk quickly can be frustrating and problematic, but it is a common issue, especially as people age. Noting the pervasiveness of slower-than-desired walking, engineers at Stanford University have tested how well a prototype exoskeleton system they developed — which attaches around the shin and into a running shoe — increased the walking speed of people in an experimental setting.
The exoskeleton is externally powered by motors and controlled by an algorithm. When the researchers optimized it for speed, participants walked, on average, 42% faster than when they were wearing normal shoes and no exoskeleton. The results of the U.S. National Science Foundation-funded study were published in IEEE Transactions on Neural Systems and Rehabilitation Engineering.
“We were hoping that we could increase the walking speed with exoskeleton assistance, but we were really surprised to find such a large improvement — 40% is huge,” said Steve Collins, a mechanical engineer at Stanford and senior author of the paper.
For this initial set of experiments, the participants were young, healthy adults. Given their impressive results, the researchers plan to run future tests with older adults and to look at other ways the exoskeleton design can be improved. They also hope to create an exoskeleton that can work outside the lab.
“The research mission is to understand the science of biomechanics and motor control behind human locomotion and apply that to enhance the physical performance of humans in daily life,” said Seungmoon Song, lead author of the paper. “Exoskeletons are very promising tools that could achieve that enhancement in physical quality of life.”
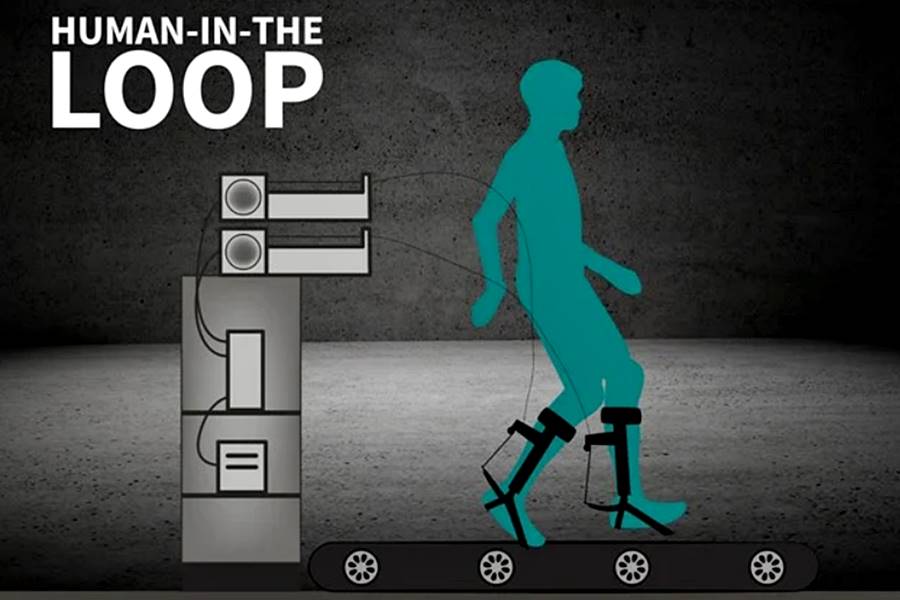
The ankle exoskeleton system tested is an experimental emulator that serves as a testbed for trying out different designs. It has a frame that fastens around the upper shin and into an integrated running shoe the participant wears. It is attached to large motors that sit beside the walking surface and pulls a tether that runs up the length of the back of the exoskeleton. Controlled by an algorithm, the tether tugs the wearer’s heel upward, helping him or her point a toe down as he or she pushes off the ground.
The mode that was optimized for speed — which resulted in the 42% increase in walking pace — was created through a human-in-the-loop process. An algorithm repeatedly adjusted the exoskeleton settings while the user walked, with the goal of improving the user’s speed with each adjustment. Finding the speed-optimized mode of operation took about 150 rounds of adjustment and two hours per person.
“Advancements in robotics and exoskeletons are benefiting people with physical limitations and disabilities,” said Irina Dolinskaya, a program director in NSF’s Directorate for Engineering. “As these researchers continue to improve their designs and extend testing to a broader population, this robotic ankle exoskeleton has great potential to assist people with stroke-related mobility impairments.”
Source: NSF | Image credit: Farrin Abbott, Stanford University
FOLLOW INDEPENDENT PRESS:
TWITTER (CLICK HERE)
https://twitter.com/IpIndependent
![]()
FACEBOOK (CLICK HERE)
https://web.facebook.com/ipindependent
![]()
Think your friends would be interested? Share this story!


